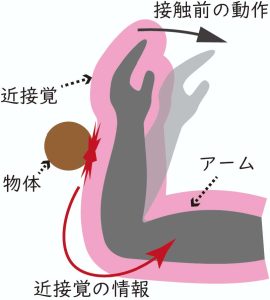
近接覚は,身体の表面から近い距離にある物体の情報を取得する,人にはない感覚です.このような感覚を実現する近接覚センサをロボットに装着すると,例えば物体と接触する前から動作を開始し,激しい衝突を防ぐことが可能になります.当研究室では,ロボットの表面を被覆しつつ高速に応答する近接覚センサの開発と,近接覚センサを利用する制御手法の開発をどちらも行うことで,柔らかく接触するロボットの実現や,ロボットの正確さの向上などを目指しています.
 |
 |
近接覚センサを用いた物体把持制御
工場などで活躍している多くのロボットハンドは,食品や農作物などの不定形物や脆弱物を掴むことを苦手としています.そこで本研究では,
・ハンドの各指が物体に対して同時に接触する機能
・ハンドの指と物体が接触する際の衝撃を緩和する機能
・物体を掴む力を制御する機能
という3つの機能を単一の制御則で実現することで,掴める対象を拡げることを目的としています.本研究では近接覚センサを活用することで物体情報を取得し,これを制御に反映することで3つの機能を実現します.
 |
ToFセンサを用いた多関節ロボットの位置・姿勢の状態推定
ロボットが未知の環境で動作するために、外部環境に対して自己位置を推定しながら環境地図を作成するSLAMという技術があります。本研究室では、この技術を多関節ロボットに応用します。近距離の物体の情報を取得可能な近接覚センサを多関節ロボットの全身に配置することで、多関節構造体全身のSLAMを行います。これにより、外部との接触を伴うような多関節ロボットや、状態推定が難しい柔軟な材質でできたロボットが、未知環境に対しても正しい姿勢を推定することを目指します。