Proximity Sensing for Robots
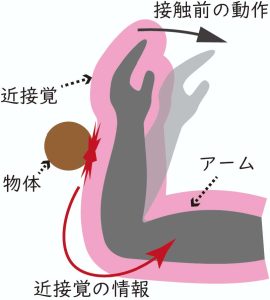
Proximity sensing is a unique sense that allows us to acquire information about objects in close proximity to the surface of the body, a sense that humans do not possess. By attaching proximity sensors to robots, they can, for example, start operating before contacting an object, preventing severe collisions. Our laboratory is working on the development of proximity sensors that respond quickly while covering the surface of the robot, as well as control methods utilizing these sensors. The aim is to realize robots that make soft contact and improve the precision of robots.
 |
 |
Object Grasping Control Using Proximity Sensors
Many robot hands used in factories struggle with grasping irregular or fragile objects such as food or agricultural products. Therefore, in this research, we aim to expand the range of objects a robot can grasp by implementing the following three functions with a single control law:
– The ability for each finger of the hand to simultaneously contact an object
– The ability to mitigate the impact when the fingers of the hand make contact with the object
– The ability to control the gripping force
By utilizing proximity sensors to acquire object information and reflecting it in the control system, these three functions are realized.
 |
Position and Posture Estimation of Multi-Jointed Robots Using ToF Sensors
For robots to operate in unknown environments, there is a technology called SLAM (Simultaneous Localization and Mapping) that estimates the robot’s position while creating a map of the environment. Our laboratory is applying this technology to multi-jointed robots. By placing proximity sensors that can acquire information about nearby objects on the entire body of the robot, we aim to perform SLAM on the entire multi-jointed structure. This will enable multi-jointed robots, or robots made of flexible materials with difficult state estimation, to correctly estimate their posture even in unknown environments.