文字を書く,蛇口をひねる,財布から紙幣を1枚だけ取り出す・・・・・・私たちは日常的に複数の指を自在に操り,様々な動作を素早く,確実に行うことができます.では,このような動作を行うためには何が“必要”なのでしょうか?当研究室では,力学や制御工学を軸にロボットハンドの制御手法を研究開発することで,私たちが行うような器用な手さばきの本質に迫ります.
把持物体の環境接触力制御
人間の手のように物を把持・操作できる,多指ロボットハンドに注目しています.当研究室では,ロボットのダイナミクスを活かした制御に取り組んでおり,現在は把持した物体が机など他の物体に接触した際の接触力を制御することを目指しています.この制御が実現できれば,把持したペンを紙に押し付けて筆記するなど,人間用の道具を把持して作業できるロボットへの応用が期待され,人間と同じ空間で作業するロボットの実現に役立つと考えています.
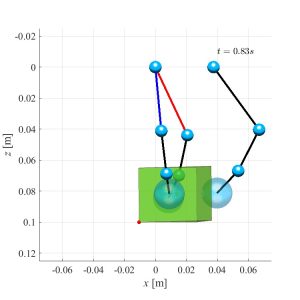 |
劣駆動ロボットハンドのインハンドマニピュレーション
関節数に比べてアクチュエータの数が少ないロボットハンドを劣駆動ロボットハンドといいます.リンク間の協調運動により人間のように把持物体全体を柔らかく包み込むような動きが実現できますが,一方で幾つかのデメリットもあり,その内の1つに器用で精密な物体把持・操作が困難なことがあげられます.当研究室では,劣駆動ハンドを用いた器用な物体把持・操作を実現する制御手法の開発を進めています.
 |