We are able to skillfully manipulate multiple fingers on a daily basis to perform various actions such as writing, turning on a faucet, or taking a single bill out of a wallet, quickly and precisely. So, what is “necessary” to carry out these kinds of movements? In our laboratory, we are focusing on control methods for robot hands based on dynamics and control engineering, aiming to uncover the essence of dexterous hand movements that we perform.
Grasping Stiffness Control
We are focusing on multi-fingered robotic hands capable of grasping and manipulating objects similar to human hands. Our laboratory is working on a control method that utilizes the dynamics of robotic systems, with a current goal of controlling the contact forces when grasped objects touch surfaces like desks or other objects. If this control can be realized, robots will be able to handle human tools such as holding a pen to write on paper, and this has promising applications for robots working in the same environment as humans.
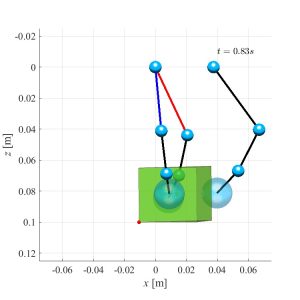 |
Under-Actuated Robotic Hand In-Hand Manipulation
Robotic hands with fewer actuators than joints are called under-actuated robotic hands. The coordinated motion between the links enables the robot to wrap around the object being grasped, similar to how humans hold things. However, one of the disadvantages is that it makes dexterous and precise manipulation of objects difficult. In our lab, we are developing control methods to achieve dexterous object grasping and manipulation using under-actuated robotic hands.
 |