私たちは普段あまり意識することはありませんが,人間の腕は一般的なロボットに比べて非常に器用でしなやかです.これは骨や筋肉で構成される身体構造も強く影響していると考えられています.この構造は筋骨格構造と呼ばれており,時に柔らかく、時に力強い筋肉の特徴をうまく活かすことで,器用でしなやかな動きを実現しています.当研究室では,この構造を取り入れたロボットにより,人間と同じような柔軟な動作の実現を目指しています.人間がどのような戦略で筋肉を動かしているのかはまだ未知の部分が多いため、ロボティクスの見地から,人間のような柔軟な動作を行うための制御手法を模索しています.
筋骨格ロボットアームの可変粘弾性制御
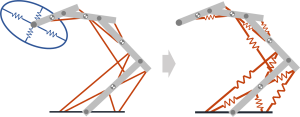
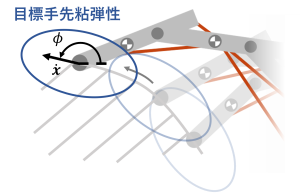
人は筋内力を調整することで筋肉の硬さを変え、環境との複雑な相互作用を実現できます。これは、関節の自由度より筋肉の数が多い筋冗長性によるものです。本研究では、この特徴を筋骨格ロボットに応用し、筋肉の特性と筋内力の調整によって手先や関節の柔軟性を制御する手法を提案します。これにより、ロボットが環境と接触する際、必要な力を発揮しながらも、余分な力を抑えて安全に作業できるようになることが期待されます。
 |
 |
関節冗長性と筋冗長性の同時活用による筋骨格マニピュレータの運動計画
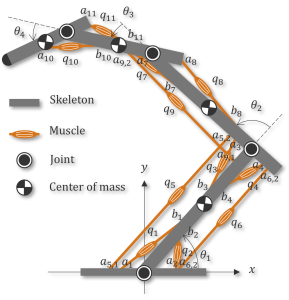
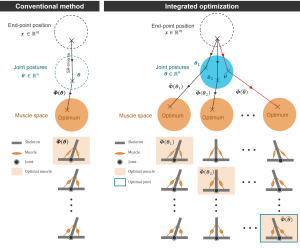
人が環境と複雑に相互作用できる要素として、筋骨格構造における関節冗長性と筋冗長性が挙げられます。関節冗長性は、手先の自由度よりも関節の自由度が多いため、手の位置や向きを保ちながら関節姿勢を調整できる特性を指します。一方、筋冗長性は、関節の自由度よりも筋肉の数が多いため、筋内力を調整することで関節の柔軟性を調整できる特性を指します。本研究では、これらの冗長性を活用した統合的な最適化フレームワークを提案し、器用で柔軟なロボットの動作の実現を目指します。
 |
 |