We do not often consciously think about it, but the human arm is incredibly dexterous and flexible compared to typical robots. This is believed to be strongly influenced by the body’s structure, which is composed of bones and muscles. This structure is known as the musculoskeletal system, and by making good use of the characteristics of muscles that are sometimes soft and sometimes strong, it enables dexterous and flexible movement. In our laboratory, we aim to achieve flexible movements similar to those of humans by incorporating this structure into robots. Since there is still much that is unknown about how humans move their muscles, we are exploring control methods for achieving flexible movement like humans from a robotics perspective.
Variable Viscoelastic Control of Musculoskeletal Robot Arms
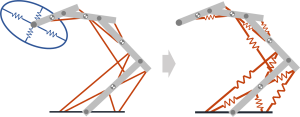
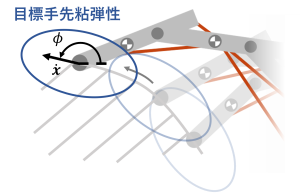
Humans can adjust the hardness of muscles by controlling muscle forces, allowing for complex interactions with the environment. This is due to muscle redundancy, where the number of muscles exceeds the degrees of freedom at the joints. In this research, we apply this characteristic to musculoskeletal robots and propose a method for controlling the flexibility of the end-effector and joints by adjusting muscle characteristics and muscle forces. This is expected to allow robots to work safely by exerting the necessary force while suppressing excess force when coming into contact with the environment.
 |
 |
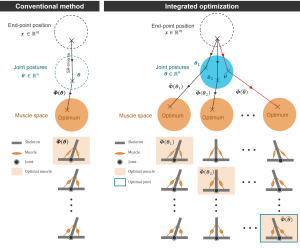
Motion Planning of Musculoskeletal Manipulators Using Joint and Muscle Redundancy Simultaneously
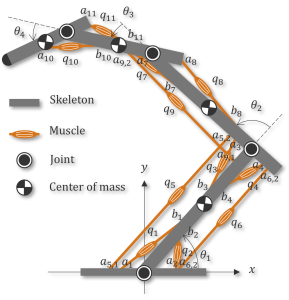
One element that allows humans to interact complexly with their environment is joint and muscle redundancy in the musculoskeletal system. Joint redundancy refers to the ability to adjust joint positions while maintaining the hand’s position and orientation, due to the number of joints exceeding the degrees of freedom at the hand. Muscle redundancy refers to the ability to adjust joint flexibility by controlling muscle forces, as there are more muscles than degrees of freedom at the joints. In this research, we propose an integrated optimization framework utilizing these redundancies to achieve dexterous and flexible robot movements.
 |
 |